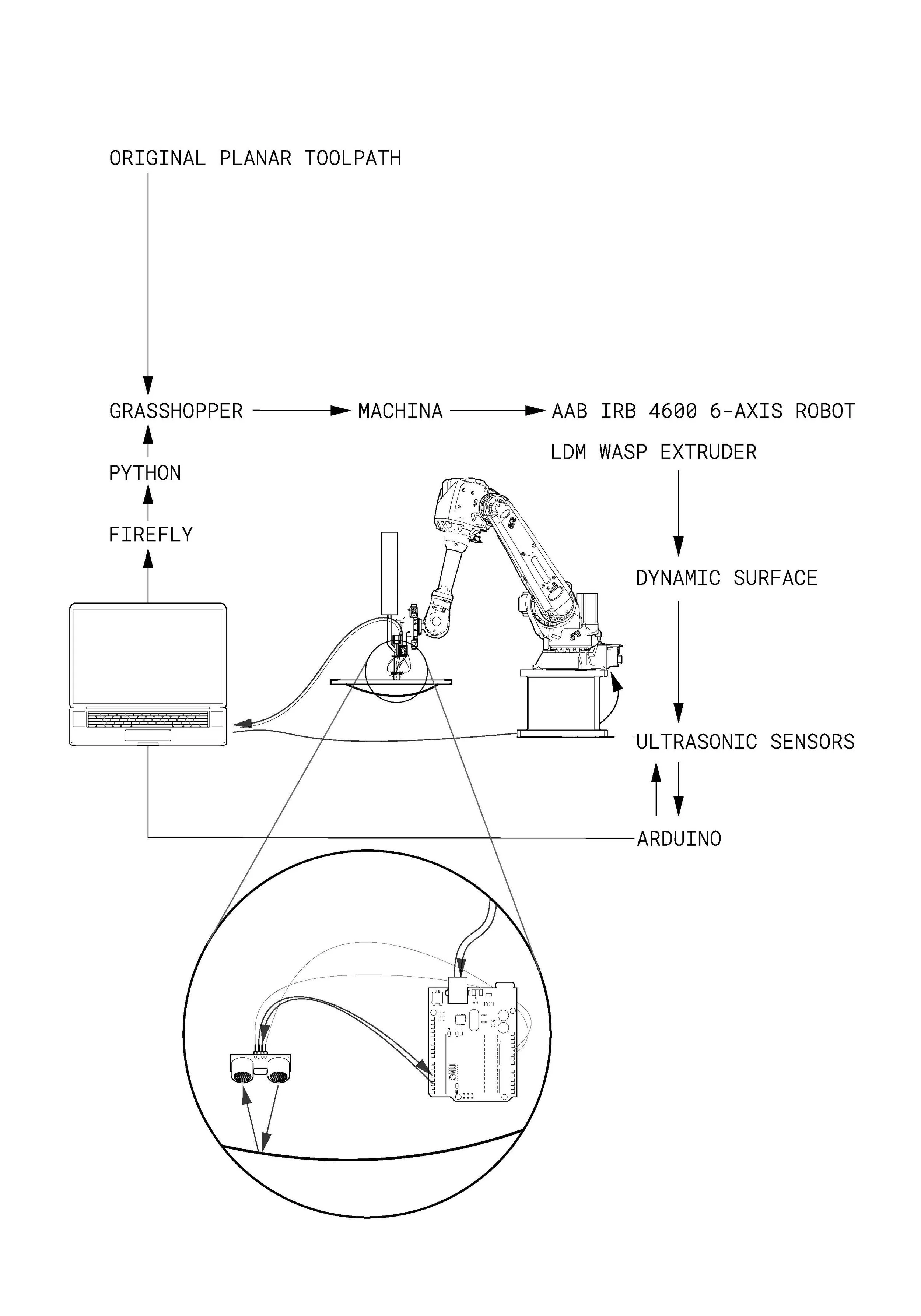
A robotic ceramic fabrication system using infrared sensors and stereoscopic imaging to adapt 6-axis arm tool paths in real-time in response to a dynamic fabric surface.
Deposition used infrared sensors and stereoscopic imaging to adapt 6-axis robotic arm tool paths in real-time in response to a highly dynamic and variable fabric surface for clay deposition and panel fabrication.
Visual surface artifact of the dynamic printing process
Panel texture detail
Results from delayed real-time feedback
Final Prototype
Final prototype ceramic panel
Panel close-up
Panel detail
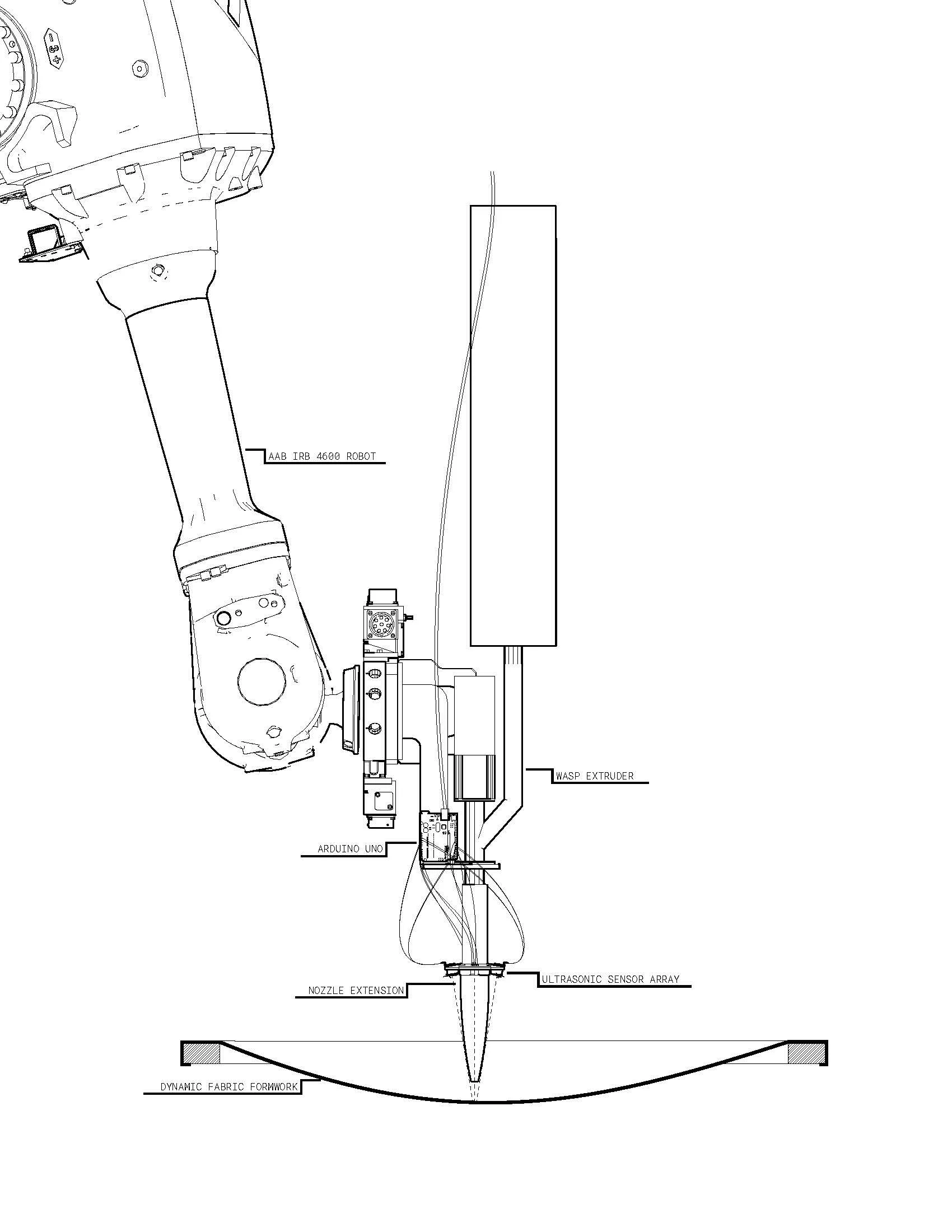
End Effector & Real-Time Response System
The end effector combined distance sensing with a real-time feedback loop, allowing the robot to respond to the deforming clay substrate as it printed.